

KD-Tree
作为当前空间信息处理绕不开的一个数据结构,KD-Tree因其在处理高维度空间信息的高效性,被广泛使用到各种机器人感知,三维重建,光线追踪算法等领域。当然也衍生了一系列针对该算法的优化方法。这篇文章将从KD-Tree的原理出发,详细谈一谈该算法的原理以及目前的优化策略。
KD-Tree 算法
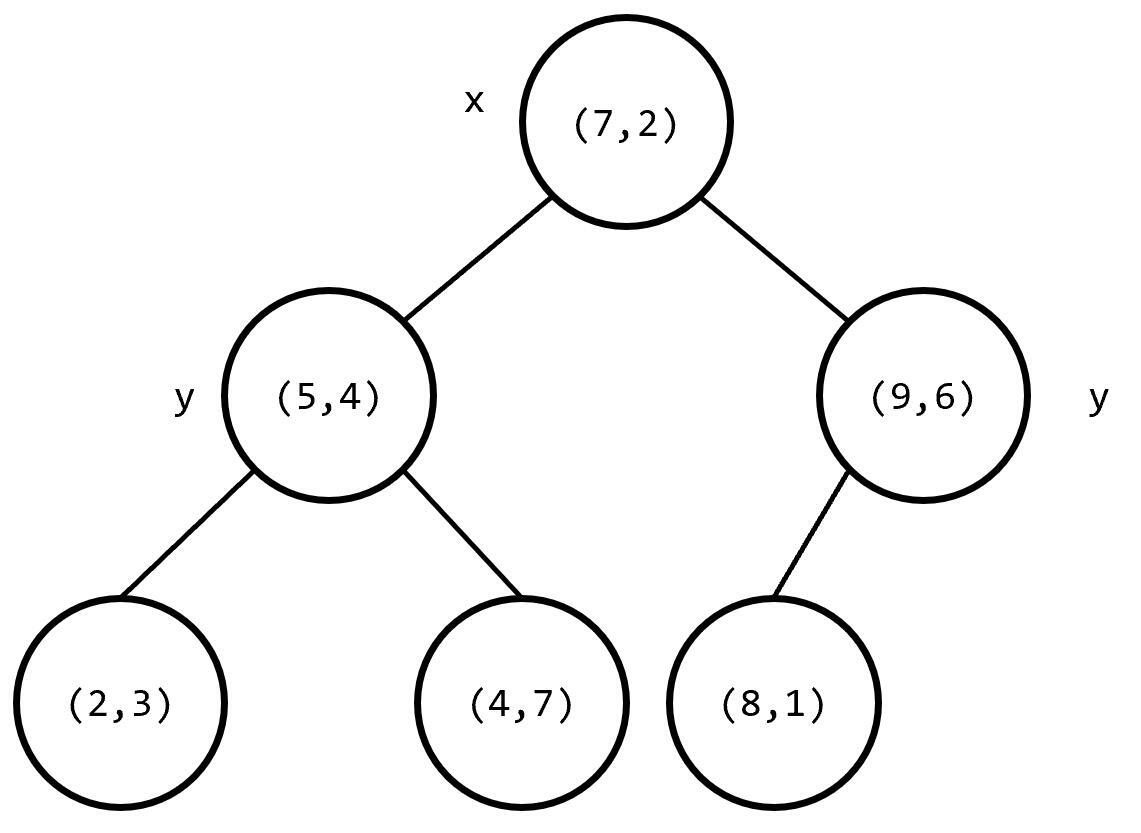
KD-Tree(k-Dimension Tree, KDT),是一种具有二叉搜索树形态的特殊的树结构,其中每个结点都对应k维空间中的一个点。每个子树中的点都在一个k维超平面内部,这个超平面也被称为边界框(Bounding Box),例如在二维空间中这个超平面就是一个平面,如下图所示,就是边界的框。
建树
综合比较下来我觉得最普遍的方式可以用OI-Wiki中的概括
假设已有 维空间中的 个不同点的坐标,要构建一个KD-Tree,步骤如下(递归):
- 如果当前超平面中只有一个点,返回。
- 选择一个维度,将当前超平面按照这个维度分成两个超平面。
- 选择切割点:在选择的维度上选择一个点,这一维度上的值小于这个点的归入一个超平面(左子树),其余的归入另一个超平面(右子树)。
- 将选择点作为子树的根节点,递归对分出两个超长方体,构建左右子树,维护子树信息。
以上图为例,构建出的树结构如下:
建树过程中最主要的优化方向就是维度与切割点的选择。这两部分的选择直接决定了树的形态。而对于一个树结构来说,越接近平衡二叉树,在空间复杂度与查询时的时间复杂度上来说都更有利。因此我们对上述步骤中的这两步做优化,在对于点云这种比较稠密的数据上,可以这么优化:
-
选择跨越维度最大的维度,对于点云这种数据来说,这能保证两个子树超平面中包含的点是均匀的。
NOTE
OI-Wiki中的原文是“轮流选择 个维度,以保证在任意连续 层里每个维度都被切割到。”,我认为也是一种面对数据密度不确定的情况下的一种有效方式。
-
分割点集时,按照所选的维度上的中位数。这样基本上能保证KD-Tree的树高最多为
比如,以三维空间为例:
点云数据:P0 = (1.2, 2.3, 1.5)P1 = (5.1, 1.2, 4.8)P2 = (2.5, 5.2, 2.1)P3 = (4.8, 3.5, 3.2)P4 = (0.5, 4.1, 0.8)P5 = (3.2, 2.5, 2.9)P6 = (5.5, 5.5, 5.5)P7 = (1.8, 1.5, 1.2)P8 = (4.2, 4.2, 4.2)P9 = (2.8, 3.8, 3.1)第一步:选择分割维度:
// 选择跨度最大的维度max_span = max(5.0, 4.3, 4.7) = 5.0 ← X维度divfeat = 0 (X坐标)divval = (0.5 + 5.5) / 2 = 3.0第二步:分割点集:
原始点集 (按X坐标):P0(1.2) P7(1.8) P2(2.5) P9(2.8) P5(3.2) P3(4.8) P1(5.1) P8(4.2) P4(0.5) P6(5.5) ↑ 分割值 = 3.0
分割后:┌─────────────────┬───────────────┬──────────────────┐│ < 3.0 │ == 3.0 │ > 3.0 │├─────────────────┼───────────────┼──────────────────┤│P0 P7 P2 P9 P4 │ P5 │P3 P1 P8 P6 ││(4个点) │ (1个点) │(4个点) │└─────────────────┴───────────────┴──────────────────┘ ↓ ↓ 左子树 右子树 继续分割 继续分割最终,树的结构:
┌─────────────────────────────────────┐ │ ROOT NODE │ │ divfeat = X (0) │ │ divval = 3.0 │ │ children: P0-P9 │ └──────────────┬──────────────────────┘ │ ┌──────────────┴──────────────────┐ ▼ ▼ ┌─────────────────┐ ┌──────────────────┐ │ LEFT NODE │ │ RIGHT NODE │ │ divfeat = Y(1) │ │ divfeat = Z(2) │ │ divval = 2.9 │ │ divval = 4.85 │ └────────┬────────┘ └────────┬─────────┘ │ │ ┌───────────┴───────────┐ ┌──────────────┴─────────────┐ ▼ ▼ ▼ ▼ ┌────────┐ ┌────────┐ ┌──────┐ ┌──────────────┐ │ LEAF │ │ LEAF │ │LEAF │ │ LEAF │ │P0 P4 │ │P7 P2 │ │P5 P9 │ │P3 P1 P8 P6 │ │(2 pts) │ │(2 pts) │ │(2pts)│ │(4 points) │ └────────┘ └────────┘ └──────┘ └──────────────┘查询
在点云slam中,最常用的处理方式将来自不同帧的点云进行比较,通过点对点匹配(ICP),点到线(PLICP),面到面(GICP)等loss模型,实现位姿估计;在实时规划方面,也会通过将点云进行分类(动态,静态障碍物),实现实时避障。在这些操作中,存在频繁对数据集中的点进行查询的操作,我们构建KD-Tree来管理点云信息的关键也在这里。
我们知道最基础的对树结构的遍历方式分为深度遍历(Deep First Search)与广度遍历(Breadth First Search)两种,但这两种搜索方式在面对庞大的点数据的KD-Tree上,无法保证高效性。而我们储存的点本身是处于三维有界线性空间的,所以自然存在“范数”这一关键概念,因此我们可以通过点点之间的范数来对树进行剪枝。
对KD-Tree进行查询的主要方式是通过最近邻搜索(k-nearest neighbors algorithm,KNN)的方式实现。
对于要查询的点,我们首先会确认查询点在分割平面的哪一侧,进而有限搜索离查询点更“近”的子树,并以此递归查询:
/* 确定查询点在分割平面的哪一侧 */Dimension idx = node->node_type.sub.divfeat; // 分割维度ElementType val = vec[idx]; // 查询点在该维度的坐标DistanceType diff = val - node->node_type.sub.divval;
/* 先搜索closer的子树 */if (diff < 0) { bestChild = node->child1; // 左子树离查询点更近 otherChild = node->child2;} else { bestChild = node->child2; // 右子树离查询点更近 otherChild = node->child1;}
/* 先递归搜索最可能包含最近邻的子树 */searchLevel(bestChild, ...);这种思路被称为最佳有限搜索(Best-First Search),配合之后的剪枝,能大幅度减少搜索的节点数。
当我们查询到某一个子树之前,我们还需要确认这个子树是否具备被查询的“价值”,我们可以通过计算查询点到分割平面的距离,当另一个子树的距离已经超过我们要搜索的最大距离,就没有必要再搜索子树,这大幅度减少了我们递归的层数,减少了空间与时间复杂度(从递归的层面来说,就没有必要将新的函数调用压入系统栈)。
/* 计算查询点到分割平面的距离 */cut_dist = distance_.accum_dist(val, divval, idx);// = (val - divval)^2
/* 当前已找到的K个点中,最远的距离 */DistanceType worst_dist = result_set.worstDist();
/* 剪枝条件:如果另一个子树的距离已经超过K个候选点的最大距离 就不必搜索它了 */if (mindist + cut_dist > worst_dist) { // 另一个子树的所有点都不会比当前K个候选更近 // 直接跳过该子树,节省大量计算! return;}以上述的树为例,我们的查询过程可以表示为:
查询点 P = (3.5, 2.1, 4.8),K=5 ↓计算初始距离 (P到根节点边界框的距离) ↓递归搜索 ├─ 比较 P[divfeat] 与分割值 ├─ 选择最可能包含最近邻的子树 (bestChild) ├─ 递归搜索 bestChild ├─ 检查是否需要搜索另一个子树 (otherChild) │ └─ 只有当 |P[divfeat] - divval| < 当前K个候选中最远点的距离 └─ 回溯
最终返回全局K个最近的点复杂度分析
对于树的构建来说,通过边界框计算,树的结构更偏向于平衡树,因此书的空间复杂度为 。
对于点集 s[n] 来说,KD-Tree 每次进行分割的时候都要求找到中位数,将其置于 s[mid] 处,需要满足 s[l] 都小于 s[mid],s[r] 都大于 s[mid] 。这样的操作的复杂度是 的。因此构建一个KD-Tree的时间复杂度更趋近于 。
对于KD-Tree的查询,可以从二维的KD-tree开始考虑。对于二维KD-Tree的一个节点来说,其有四个孙子节点,且它到每一个孙子都在两个维度上各进行了一次划分。按照这种方法将一个矩形划分成四个子矩形,一条与坐标轴平行的线段最多经过两个区域,即从 𝑢 [u] 出发的查询,最多向下进入两个孙子,由于建树的时候,子树在当前划分维度的中位数,所以子树大小必定减半。于是假设该节点的的子树的大小是 ,那么就有如下的递推式:
由Master定理可得 。
推广到 维,可得:,于是可得: